

TÀI LIỆU PLC
Hiển thị các bài đăng có nhãn do-an. Hiển thị tất cả bài đăng
Hiển thị các bài đăng có nhãn do-an. Hiển thị tất cả bài đăng
Đồ án tốt nghiệp: "Thết kế hệ thống điều khiển Đèn giao thông trên Micro PLC SIMATIC S7- 200" nhằm tìm hiểu về các thiết bị tự động hoa, các giải pháp thiết kế đèn giao thông bằng plc tự động hoa tích hợp toan diện thông qua PLC S7 – 200 và quan trọng nhất là những ứng dụng đồ án điều khiển logic đèn giao thông trong cuộc sống.
tailieukythuathay
"Đồ án tốt nghiệp: Thiết kế và mô phỏng thang máy với PLC S7-300" trình bày về nghiên cứu phân tích cấu trúc thang máy, khảo sát đặc tính của thang máy và các yêu cầu điều khiển thang máy, xây dựng hệ thống điều khiển và lập trình điều khiển thang máy, xây dựng mô hình mô phỏng thang máy. Đây là tài liệu hữu ích cho các bạn thuộc chuyên ngành Cơ khí.
 |
| Đồ án tốt nghiệp: Thiết kế và mô phỏng thang máy với PLC S7-300 - GVHD Trần Văn Khôi |
tailieukythuathay
Tham khảo luận văn - đề án 'đồ án tốt nghiệp giới thiệu chung về điều khiển logic khả lập trình plc, luận văn - báo cáo phục vụ nhu cầu học tập, nghiên cứu và làm việc hiệu quả.
Trong những năm gần đây bộ điều khiển lập trình PLC được sử dụng ngày càng rộng rãi trong công nghiệp ở nước ta như là một giải pháp điều khiển lý tưởng cho việc tự động hóa các quá trình sản xuất. Hiện nay trong nước chưa có một giáo trình tiếng Việt nào giới thiệu đầy đủ về bộ điều khiển lập trình nhằm đáp ứng nhu cầu học tập và nghiên cứu. Trên cơ sở khảo sát những tài liệu kỹ thuật về bộ điều khiển lập trình của hãng Siemens em xin giới thiệu bộ điều khiển lập trình simatic S7- 200

Trong những năm gần đây bộ điều khiển lập trình PLC được sử dụng ngày càng rộng rãi trong công nghiệp ở nước ta như là một giải pháp điều khiển lý tưởng cho việc tự động hóa các quá trình sản xuất. Hiện nay trong nước chưa có một giáo trình tiếng Việt nào giới thiệu đầy đủ về bộ điều khiển lập trình nhằm đáp ứng nhu cầu học tập và nghiên cứu. Trên cơ sở khảo sát những tài liệu kỹ thuật về bộ điều khiển lập trình của hãng Siemens em xin giới thiệu bộ điều khiển lập trình simatic S7- 200
tailieukythuathay
Đồ án học phần 3: Tự động hóa quá trình công nghệ với đề tài: "Ứng dụng PLC S7-300 điều khiển hệ thống rửa xe tự động" trình bày cơ sở lý thuyết tự động hóa, quá trình công nghệ, xây dựng mạch điều khiển và mạch động lực, viết chương trình điều khiển bằng S7-300. Mời bạn đọc tham khảo.
Nội dung
Chương I:Cơ sở lí thuyết tự động hóa . 5
Nội dung
Chương I:Cơ sở lí thuyết tự động hóa . 5
1.1. Mở đầu . 5
1.2. Các thành phần cơ bản của một bộ PLC . 6
1.2.1. Cấu hình phần cứng . 6
1.2.2. Cấu tạo chung của PLC . 9
1.3. Các vấn đề về lập trình . 10
1.3.1 Khái niệm chung . 10
1.3.2. Các phương pháp lập trình . 11
1.3.3. Các rơle nội . 15
1.3.4. Các rơle thời gian . 16
1.3.5. Các bộ đếm . 17
1.4. Đánh giá ưu nhược điểm của PLC . 17
ChươngII:Bộ điều khiển PLC S7-300 . 20
2.1 Cấu hình cứng . 20
2.1.1. Cấu tạo của họ PLC- S7-300 . 20
2.1. 2 Địa chỉ và gán địa chỉ . 22
2.2 Vùng đối tượng . 23
2.2.1 Các vùng nhớ . 23
2.2.2. Nhập các hằng số . 24
2.3 Ngôn ngữ lập trình . 25
2.3 1. Cấu trúc chương trình S7-300 . 25
2.3.2. Bảng lệnh của S7-300 . 27
2.4. Lập trình một số lệnh cơ bản . 27
2.4. 1. Nhóm lệnh 1ogic . 27
2.4.2. Nhóm lệnh thời gian . 30
2.4.3. Nhóm lệnh đếm . 34
Chương III: Tìm hiểu công nghệ . 38
3.1 Giới thiệu công nghệ rửa xe ô tô . 38
Đồ án học phần 3: Tự động hóa quá trình công nghệ
SVTH :Đặng Văn Trình Page 2
GVHD:Trần Đức Chuyển
3.1.1Giới thiệu các phương pháp rửa xe ô tô . 38
3.1.2 Sơ đồ nguyên lý cung cấp nước cho hệ thống rửa xe tự động . 38
3.1. 3. Phương án công nghệ của phương pháp rửa xe tự động . 39
3.2 Phương pháp thực tế ở Việt Nam. 41
3.3. Khảo sát kết cấu các chi tiết chính trong hệ thống rửa xe tự động trong phương án lựa chọn . 42
3.3.1. Đường ray . 42
3.3.2 Các thiết bị phun nước cao áp, hun chất tẩy . 42
3.3.3 Chổi lau xe. . 42
3.3.4.Hệ thống sấy khô . 43
3.3.5 Động cơ kéo băng tải . 43
3.3.6 Thiết bị điều khiển quá trình . 43
3.4 Kết luận về quá trình tìm hiểu công nghệ . 44
3.5 Mô hình xây dựng . 44
ChươngVI:Chương trình điều khiển . 46
4.1.Mạch điều khiển và mạch động lực . 46
4.1.1 Mạch điều khiển . 46
4.1.2 Mạch động lực . 48
4.2 Thực hiện trên S7-300 . 49
4.2.1 Sơ đồ kết nối. . 49
4.2.2 Chương trình lập trình trên S7-300. . 50
4.2.3 Mô phỏng bằng PLC sim . 54
4.3 Các tài liệu tham khảo . 60
tailieukythuathay
Tài liệu tham khảo dành cho giáo viên, sinh viên chuyên ngành điện tử, tự động hóa Điều khiển lập trình bằng PLC cho hệ thống đóng thùng bia tự động. Đây là một đồ án môn học với đề tài “Điều khiển lập trình bằng PLC cho hệ thống đóng thùng bia tự động”. Bài làm tương đối đầy đủ, chủ yếu là xoay quanh S7-200 của SIEMEN.

Nội dung của phần thuyết minh:
1. Giới thiệu chung về “ĐIỀU KHIỂN LẬP TRÌNH BẰNG PLC”
2. Giới thiệu về PLC – S7-200 của SIEMEN
3. Tìm hiểu tập lệnh PLC của S7-200
4. Viết chương trình điều khiển đóng thùng bia tự động
5. Chạy thử chương trình trên phần mềm mô phỏng Simulator của Siemen.
Các bản vẽ: (trong thuyết minh)
1. Bản vẽ lưu đồ giải thuật mã hoá (bằng lời)
2. Bản vẽ mạch kết nối của thiết bị điều khiển
3. Bản vẽ mạch động lực.
4. Bản vẽ mạch điều khiển
Type: PDF
Size: 335KB
Pages: 31
tailieukythuathay
Tham khảo luận văn - đề án 'đồ án tốt nghiệp - thiết kế mô hình cửa đóng mở tự động cho gara ô tô với kỹ thuật plc, luận văn - báo cáo phục vụ nhu cầu học tập, nghiên cứu và làm việc hiệu quả

tailieukythuathay
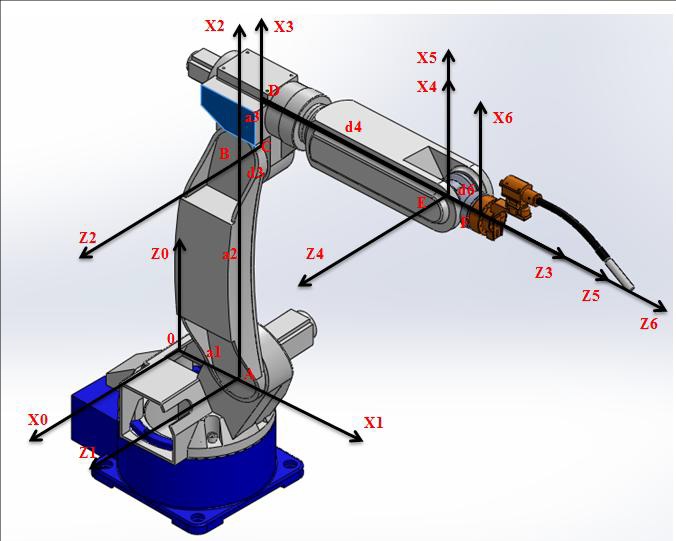
Đồ án tốt nghiệp: Sử dụng PLC điều khiển hệ thống truyền động trong Robot công nghiệp này sẽ giúp các bạn nắm được kiến thức về chế tạo robot nói chung, cách sử dụng PLC điều khiển hệ thống truyền động trong robot công nghiệp nói riêng. Mời các bạn cùng tham khảo.

Chương 1 Tổng quan về Robot công nghiệp 3
1.1 Lịch sử phát triển 3
1.2 Phân loại rôbốt công nghiệp 4
1.2.1 Theo chủng loại, mức độ điều khiển 4
1.2.2 Phân loại tay máy theo cấu trúc sơ đồ động 4
1.3 Sơ đồ cấu trúc chức năng của Rôbot 6
1.4 Ứng dụng Rôbốt trong công nghiệp 8
1.4.1 Mục tiêu ứng dụng Rôbốt trong công nghiệp 8
1.4.2 Các bước ứng dụng Rôbốt 9
1.4.3 Các lĩnh vực ứng dụng Rôbôt trong công nghiệp 10
1.4.4 Nội dung nghiên cứu phát triển Rôbốt công nghiệp 14
1.4.4.1 Nhận xét về quá trình phát triển robot công nghiệp 14
1.4.4.2 Cơ-tin-điện tử và robot công nghiệp 15
1.4.4.3 Robot và hệ sản xuất linh hoạt 16
1.4.4.4 Robot song song 17
1.4.4.5 Các xu thế ứng dụng robot trong tương lai 18
Chương 2 Lý thuyết điều khiển tự động Rôbôt công nghiệp 22
2.1 Khái niệm chung về hệ thống điều khiển Rôbốt công nghiệp 22
2.1.1 Khái niệm về hệ thống điều khiển tự động 21
2.1.2 Các loại tín hiệu điều khỉên 23
2.2 Phân loại hệ thống điều khiển tự động 23
2.2.1 Hệ thống điều khiển hở 23
2.2.2 Hệ thống điều khiển kín 24
2.3 Phần tử logic trong hệ thống điều khiển tự động 26
2.3.1 Khái niệm về lôgic hai trạng thái 26
2.3.2 Phần tử RS-Flipfop có SET trội hơn 34
2.4 Hệ thống điều khiển dùng các bộ PLC 36
2.4.1 Giới thiệu chung về các bộ PLC 36
2.4.2 Các bộ phận cơ bản của hệ thống PLC 39
2.4.3 Cấu trúc của các bộ PLC 40
2.4.4 Cấu trúc bên trong của PLC 43
2.4.5 Ngôn ngữ lập trình cho PLC 51
2.4.6 Bộ PLC OMRON SYSMAC CPM2A 52
2.4.7 Bộ PLC LG K7M-DR30S 55
Chương 3 Kết cấu của hệ thống Điều khiển trong rôbốt cấp phôi tự động 60
3.1 Động cơ điện và điều khiển động cơ. 60
3.1.1 Ứng dụng truyền động điện 60
3.1.2 Động cơ điện một chiều 60
3.1.3 Động cơ bước 63
3.1.4 Động cơ biến tần 69
3.2 Cảm biến trong rôbốt công nghiệp 69
3.2.1 Giới thiệu chung 69
3.2.2 Các loại cảm biến 71
3.2.2.1 Cảm biến vị trí 71
3.2.2.2 Cảm biến vị trí kiểu biến áp 74
3.2.2.3 Vận tốc kế 75
3.2.2.4 Cảm biến lực và cảm biễn xúc giác 76
3.2.2.5 Thiết bị quan sát (Visual System) 80
3.2.2.6 Các cảm biến thường gặp trong rôbốt gắp phôi tự động 83
3.3 Hệ thống vận hành khí nén trong rôbốt công nghiệp 84
3.3.1 Giới thiệu chung về hệ thống truyền động tự động trong Rôbốt cấp phôi tự động 84
3.3.2 Các phần tử của hệ thống điều khiển khí nén trong Rôbốt cấp phôi tự động 88
3.3.2.1 Hệ thống cung cấp và xử lý khí nén 88
3.3.2.2 Tín hiệu tác độnglên van đảo chiều 97
3.3.2.3 Van đảo chiều có vị trí không 99
3.3.2.4 Van đảo chiều không có có vị trí không 103
3.3.3 Cơ cấu chấp hành 103
3.4 Các mạch điều khiển khí nén trong rôbốt cấp phôi tự động 104
tailieukythuathay
Đăng ký:
Bài đăng (Atom)
